Đã được đăng vào 31/05/2019 @ 10:26
Sơ đồ mạch bơm nước tự động bằng phao và rơ le cảm biến
Thay vì mỗi lần cần bơm nước ta phải dùng tay bật công tắc máy bớm, thì với việc dùng phao sẽ giúp tự động hóa hoàn toàn quá trình máy bơm nước cho gia đình
Khi nước trong bồn (bể) cạn, máy tự động chạy để bơm nước
Khi bồn (bể) đầy máy tự động dừng bơm theo sự điều khiển hoàn toàn bằng phao và bạn yên tâm không lo nước bị tràn ra ngoài do quên dừng bơm khi đầy.
Xem thêm:
Ngoài dùng phao để điều khiển bơm nước tụ động, thì với các hệ thống yêu cầu điều khiển chính xác mực nước người ta có thể dùng tới loại rơ le chuyên dụng kết hợp với các que (cảm biến mức) để điều khiển, cụ thể:
1. NGUYÊN LÝ HOẠT ĐỘNG
Phần đóng cắt nguồn điện của phao nhựa là một dạng công tắc hành trình, công tắc mà các tiếp điểm của nó được đóng mở bằng sự tác động cơ học của bộ phận máy di động.
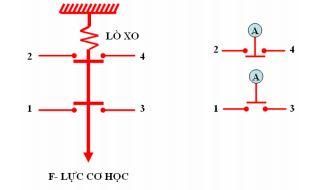
Nguyên lý làm việc của công tắc hành trình:
- Bình thường, dưới tác động của lò xo, tiếp điểm (2-4) ở trạng thái đóng, tiếp điểm (1-3) ở trạng thái mở.
- Khi lực F tác động đủ lớn để thắng lực lò xo, các tiếp điểm sẽ chuyển trạng thái ngược lại, (2-4) mở và (1-3) đóng.
Phao nhựa là công tắc hành trình sử dụng lực F là trọng lực của 2 phao nhựa.
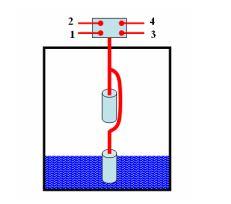
Khi nước đầy 2 phao nhựa nổi lên theo, làm dây kéo liên kết với công tắc hành trình trùng lại, tiếp điểm (2-4) đóng, (1-3) tiếp điểm mở
Khi nước cạn dần quả phao phía trên bị treo, đã tác động một lực nhỏ lên dây kéo công tắc hành trình, lực này chưa đủ lớn để làm công tắc hành trình thay đổi trạng thái, nếu tiếp tục nước cạn quả phao phía dươi bị treo và tác động thêm một lực nữa, lúc này đã đủ lớn để làm thay đổi trạng thái công tắc hành trình: tiếp điểm (2-4) mở, tiếp điểm (1-3) đóng
Tuỳ theo mục đích sử dụng, ta có thể sử dụng tiếp điểm (1-3) hay (2-4).
Ngoài ra, trọng lượng của 2 phao nhựa phải phù hợp với công tắc hành trình. Nếu phao nhựa nặng quá hay nhẹ quá thì sẽ dẫn đến công tắc hành trình hoạt động không đúng. Trong thực tế khi mua phao nhựa nhà sản xuất đã cố định khối lượng của phao phù hợp với bộ công tắc hành trình đi kèm, nếu mua về bạn chỉ cần sử dụng.
2. MẠCH BƠM NƯỚC SỬ DỤNG PHAO NHỰA
Trong đa số các trường hợp, để thiết lập mạch bơm nước tự động, người ta chỉ sử dụng 1 phao nhựa đặt tại vị trí bể chứa nước là nơi cần bơm nước lên.
Nhưng trong 1 số trường hợp, máy bơm chỉ cho phép hoạt động khi nguồn nước cung cấp cho máy bơm đầy. Vì vậy, ta sử dụng 2 phao nhựa để điều khiển cho máy bơm.
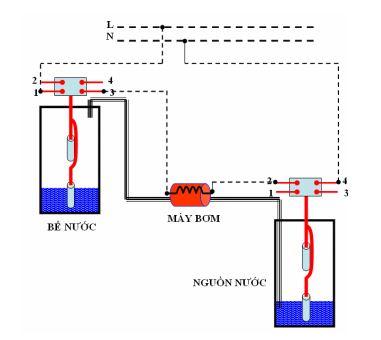
Máy bơm chỉ hoạt động khi tiếp điểm (1-3) của phao đặt tại bể nước đóng (tức mực nước bể nước bị cạn) và đồng thời tiếp điểm (2-4) đặt tại nguồn nước đóng (nguồn nước đầy, đủ cung cấp nước cho máy bơm).
3. MẠCH ĐỘNG LỰC VÀ ĐIỀU KHIỂN
a. Mạch động lực
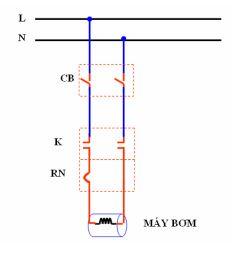
Mạch động lực của máy bơm gồm : CB, contactor và rơle nhiệt
- CB dùng để bảo vệ ngắn mạch cho máy bơm.
- Contactor K có chức năng điều khiển máy bơm.
- Rơle nhiệt dùng để bảo vệ quá tải cho máy bơm.
b. Mạch điều khiển tự động
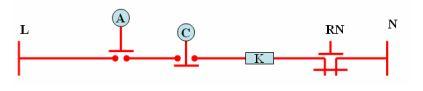
Cuộn dây K của contactor điều khiển máy bơm chỉ được cấp điện khi có đồng thời 2 điều kiện:
- Tiếp điểm C đóng : nguồn nước cấp cho máy bơm đầy. Ở đây, bảo vệ cho nguồn nước chúng ta sử dụng công tắc hành trình phao nhựa C.
- Tiếp điểm A đóng: bể nước cần bơm nước lên cạn nước.
c. Mạch điều khiển bằng tay và tự động
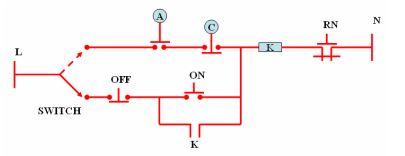
Công tắc switch sẽ cho phép chuyển đổi giữa chế độ bằng tay và tự động.
Khi công tắc switch bật lên trên, mạch ở chế độ vận hành tự động. Khi đó máy bơm sẽ tự hoạt động khi nước trên bồn cần bơm lên bị cạn và sẽ tắt khi nước đầy hoặc khi nguồn nước không đủ để bơm.
Khi công tắc Switch bật xuống dưới, mạch ở chế độ vận hành bằng tay, máy bơm hoạt động khi ta nhấn nút ON và sẽ tắt khi ta nhấn nút OFF.
Khi máy bơm bị quá tải, rơle nhiệt tác động thì sẽ ngắt nguồn điện cấp cho cuộn dây contactor K, máy bơm ngừng.
4 . MẠCH BƠM NƯỚC DÙNG RƠ LE VÀ QUE CẢM BIẾN
a. Cấu tạo rơle Floatles Switch
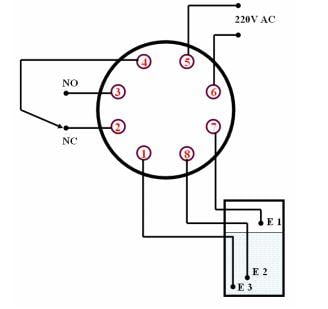
Rơle Floatles Switch gồm có 8 chân, với chức năng của các chân như sau:
- Chân 5-6 : cuộn dây của rơle, có điện áp định mức 220V AC.
- Chân 1, 8, 7 : nối với các que dò
- Chân 2-4 : tiếp điểm thường đóng.
- Chân 2-3 : tiếp điểm thường mở.
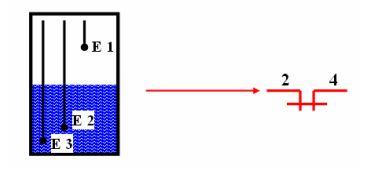
b. Nguyên lý hoạt động
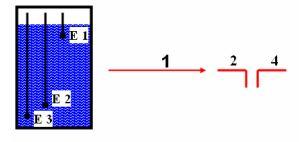
Khi rơle vừa được cấp điện, căn cứ vào trạng thái các đầu dò E1, E2, E3, sẽ tác động thay đổi trạng thái của các cặp tiếp điểm (2-4) và (3-4)
Nếu như bể đầy nước, tức mực nước cao hơn E1, thì giữa E1 và E3 nối mạch, khi đó cặp tiếp điểm (2-4) sẽ mở.

Nếu như bể không đầy nước, tức mực nước thấp hơn E1, thì giữa E1 và E3 hở mạch, khi đó cặp tiếp điểm (2-4) sẽ đóng.
Sau đó, rơle sẽ hoạt động liên tục qua các trạng thái sau:
Tiếp điểm 2-4 sẽ đóng cho đến khi nước đầy – cao hơn E1 thì 2-4 sẽ mở
Tiếp điểm 2-4 vẫn sẽ mở khi mực nước bắt đầu giảm xuống dưới E1
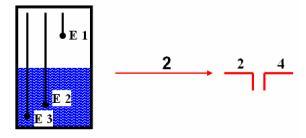
Tiếp điểm 2-4 mở cho đến khi mực nước giảm thấp hơn E2 thì 2-4 sẽ đóng lại
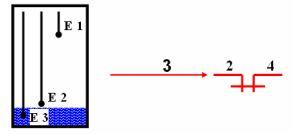
Như vậy, trạng thái 2 bảo đảm thời gian chờ cho máy bơm, tránh hiện tượng máy bơm hoạt động liên tục khi mực nước dao động quanh E1
**Nếu muốn mua cho nhanh thì xem thử sản phẩm này: Mạch Bơm Nước Tự Động XH-M203
Nguồn: machdientu.org
Để lại một bình luận