Đã được đăng vào 10/12/2019 @ 11:02
Máy phân loại tự động – Cơ điện tử
Dự án này thiết kế máy phân loại tự động. Hệ thống do các sinh viên khoa cơ điện tử chế tạo.
Máy có thể phân loại 2 tấm gỗ vuông khác nhau: 1 có lỗ ở giữa – 1 không có lỗ. Hệ thống sẽ tự đánh giá loại gỗ và phân loại tự động.
Xem thêm:
Cách làm việc:
- Các tấm gỗ khác nhau được đưa vào máy (bằng tay).
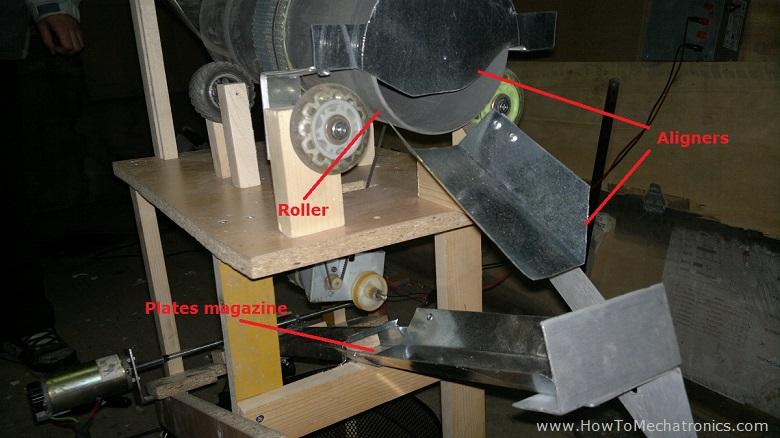
- Ray trượt và con lăn đưa các tấm gỗ vào trong máng ( plate magazine ) lần lượt từng cái.
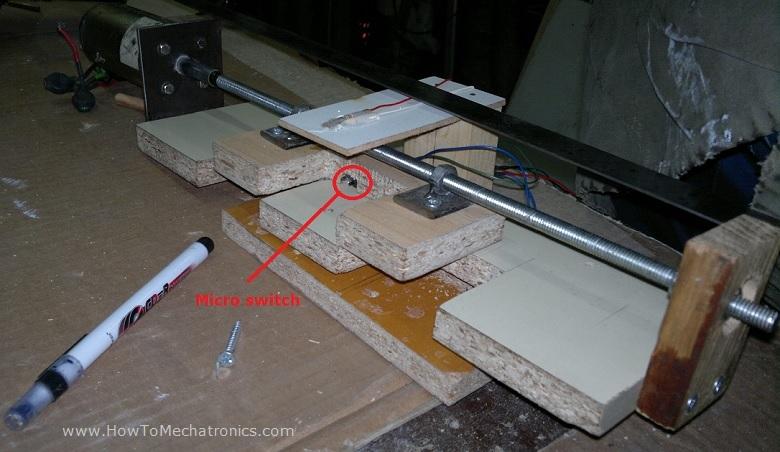
- Khi các tấm gỗ chạm đến đáy của máng dùng để phân loại, nó sẽ kích hoạt một công tắc hành trình nhỏ ( micro switch ).
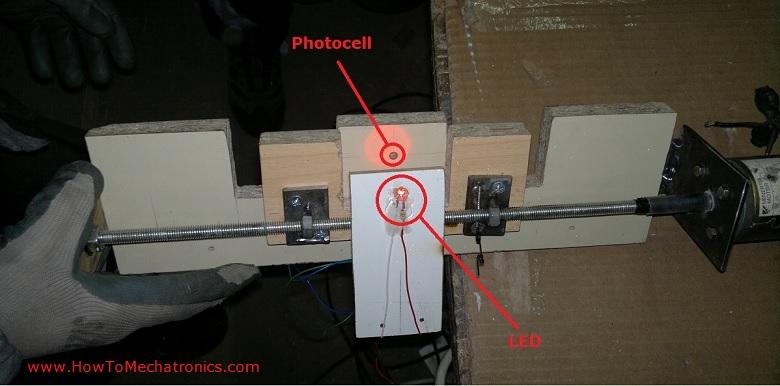
- Khi công tắc hành trình kích hoạt, đèn LED sáng.
- Nếu tấm gỗ có lỗ tròn, ánh sáng từ đèn LED sẽ đi qua được và kích hoạt Quang trở ( Photocell ) –> Động cơ quay sang bên phải.
- Nếu tấm gỗ KHÔNG có lỗ tròn, ánh sáng từ đèn LED không đến được Quang trở ( Photocell ) –> Động cơ quay sang bên trái.
-Phần cơ khí các bạn tự xem hình cũng như video để mô phỏng lại nhé:

– Mạch nguyên lý:
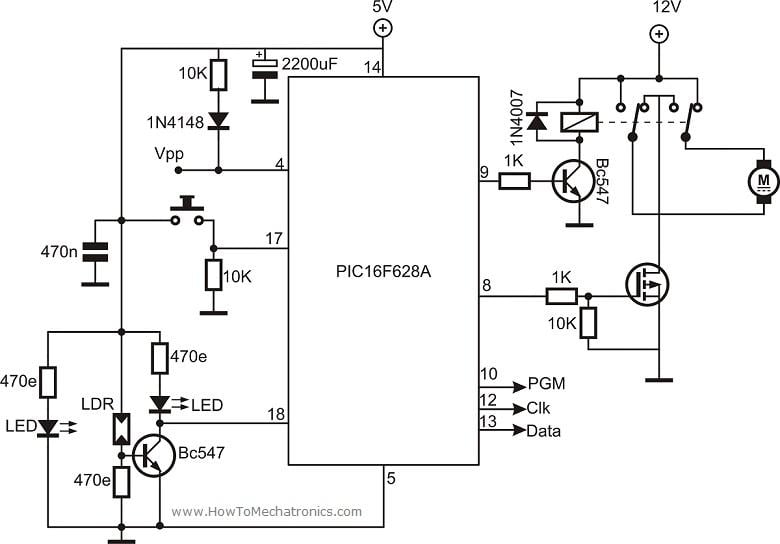
Code cho vi điều khiển PIC16F628A sử dụng chương trình MikroElektronika
/********************************************************************************/
/* Mechatronic Design Team */
/* Proekt po Konstruiranje i CAD */
/* "Dizajn i razvoj na nov ured za razdeluvanje na dva tipa plocki" */
/* */
/* */
/* */
/* Mikrokontroler: PIC16F628A */
/* Oscilator: Interen na 4MHz */
/* */
/* Dekemvri, 2012, Skopje */
/********************************************************************************/
void left () {
RB2_bit = 1; //motorot pocnuva da se dvizi na levo
delay_ms (500); // motorot se dvizi do krajna leva polozba
delay_ms (500);
delay_ms (500);
delay_ms (500);
PORTB = 0x00; //koga ke stigne do krajnata leva polozba se gasi
delay_ms (200); //vreme za kocenje na motorot
RB3_bit = 1; //se aktivira relejot za promena na nasokata
delay_ms (20);
RB2_bit = 1; //motorot pocnuva da se dvizi desno
delay_ms (500); //sredna pozicija na motorot
delay_ms (500);
delay_ms (500);
delay_ms (500);
PORTB = 0x00; //motorot se gasi koga ke dojde do sredina
delay_ms (150); //vreme za kocenje na motorot
}
//////////////////////////////////////////////////////////////////////////////
void right () {
RB3_bit = 1; //Se uklucuva relejot za promena na nasoka na motorot
delay_ms (30);
RB2_bit = 1; //motorot pocnuva da se dvizi desno
delay_ms (500);
delay_ms (500);
delay_ms (500);
delay_ms (500); //motorot se dvizi do krajna desna polozba
PORTB = 0x00; //koga ke stigne do krajna desna polozba se gasi
delay_ms (200); //vreme za kocenje na motorot
RB2_bit = 1; //motorot pocnuva da se dvizi levo
delay_ms (500); //sredna pozicija na motorot
delay_ms (500);
delay_ms (500);
delay_ms (500); //sredna pozicija na motorot
PORTB = 0x00; //motorot se gasi koga ke dojde do sredina
delay_ms (150); //vreme za kocenje na motorot
}
//////////////////////////////////////////////////////////////////////////////
void main() { //pocetok na glavna programa
TRISB = 0x00; //PORTB Izlezi
TRISA = 0xff; //PORTA Vlezovi
CMCON = 0x07; //gasenje na komparatori
do {
delay_ms (50);
PORTB = 0x00;
if (PORTA.b0==1) { //dali ima kocka?
delay_ms (100);
if (PORTA.b1==0) { //dali ima otvor?
left (); } //ako ima otvor dvizi se levo
else (right ()); }} //ako nema dvizi se desno
while (1); }Nguồn: howtomechatronics.com
Để lại một bình luận